
Design of a Lidar-Based Safe Braking Distance Warning System for Small Electric Vehicles
Article Sidebar
Main Article Content
Abstract
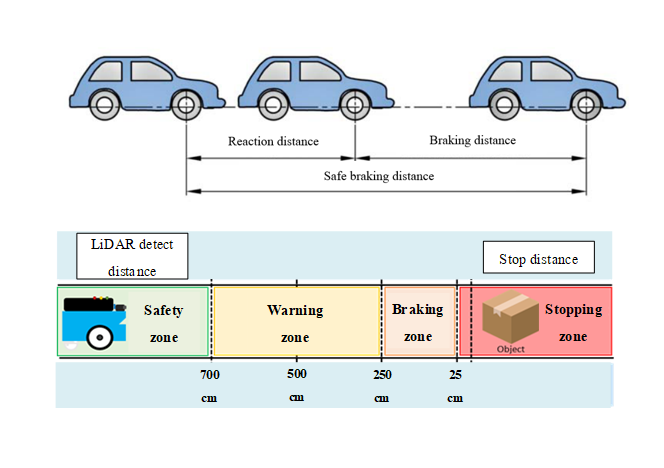
This paper presents a braking distance warning system design using LiDAR technology to measure distances when approaching an object. The objective was to study and develop a system for vehicles that provides warnings before a potential collision occurs. The proposed system was designed for installation in small vehicles that lack basic driving assistance systems to detect objects in front of the vehicle. The current research divides the braking distance for testing into four zones: Zone 1 - Safe distance (greater than 700 cm from an object), Zone 2 - Caution distance (250 - 700 cm), Zone 3 - Brake distance (25 - 250 cm) and Zone 4 - Stop distance (less than 25 cm). In order to conduct this study, a prototype vehicle was moving toward an object at a constant speed of 15 km/hr. It was found that when the prototype was positioned 767.67 cm in front of the object, the warning system would display a green light to indicate a safe distance. When the prototype approached the object at a distance of 593 cm, it would indicate a yellow light for a caution distance. Once the vehicle reached the object at a distance of 237.67 cm, a red status indicator for braking distance was shown. Finally, when approaching the object at a distance of 23 cm, the system would initiate a speed reduction with a deceleration of 0.524 m/s2. This investigation showed that the proposed system was able to operate according to the specified conditions with a braking error of 5.77% from the designated distances. The system developed in this work can be applied to larger-sized vehicles to assist in braking or automatically reduce speed, thereby minimizing the occurrence of accidents.
Article Details

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
The content and information in the article published in Journal of Rajamangala University of Technology Srivijaya It is the opinion and responsibility of the author of the article. The editorial journals do not need to agree. Or share any responsibility.
References
Aly, A.A., Zeidan, E., Hamed, A. and Salem, F. 2011. An Antilock-Braking System (ABS) Control: A Technical Review. Intelligent Control and Automotive 2(3): 186-195.
Dai, Z., Wolf, A., Ley, P., Gluck, T., Sundermerier, M.C. and Lachmayer, R. 2022. Requirements for Automotive LiDAR System. Sensor 22(19): 7532.
Ebrahimi-Nejad, S. and Kheybari, M. 2017. Brake System Design for Sports Cars using Digital Logic Method. International Journal of Automotive Engineering 7(4): 2570-2582.
Euro NCAP, Vehicle Safety, The Rating Explained, Safety Assist, AEB Car to Car. 2020. AEB Car to Car System Are Tested Across A Wide Range of Speed and Vehicle Overlaps and Traffic Situations. Available Source: https://www.euroncap.com/en/vehicle-safety/the-ratings-explained/safety-assist/aeb-car-to-car/, August 10, 2020.
Gaurkar, P.V., Ramakrushnan, K., Challa, A., Subramanian, S.C., Vivekanandan, G. and Sivaram, S. 2022. An Anti-Lock Braking System Algorithm using Real-Tiam Wheel Reference Slip Estimation and Control. Journal of Automobile Engineering 236(4): 676-688.
Guo, J., Wang, Y., Yin, X., Liu, P., Hou, Z. and Zhao, D. 2022. Study on the Control Algorithm of Automatic Emergency Braking System (AEBS) for Commercial Vehicle Based on Identification of Driving Condition. Machines 10(10): 895.
He, R. and Jing, Z. 2019. Study on Braking Stability of Commercial Vehicles: And optimized Air Brake System. Advances in Mechanical Engineering 11(5): 168781401984859.
Hua, X., Zeng, J., Li, H., Huang, J., Luo, M., Feng, X., Xiong, H. and Wu, W. 2023. A Review of Automobile Brake-by-Wire Control Technology. Processes 11(4): 994.
Meng, B., Zhou, Z., Zhang, C. and Yang, F. 2023. A Design Method for Booster Motor of Brake-by-Wire System Based on Intelligent Electric Vehicle. Green Energy and Intelligent Transportation 2(4): 100110.
Mustafar, M.Z.C. and Bakar, S.A.A. 2020. Optimal Design of an Autonomous Emergency Braking (AEB) System for a Passenger Vehicle. IOP Conference Series: Materials Science and Engineering 884(1): 012088.
Nugraha, A.A., Sumarsono, D.A., Adhity, M. and Prasetya, S. 2021. Development of Brake Booster Design for Electric City Cars. International Journal of Technology 12(4): 802-812.
Popa, G., Gheti, M.A., Tudor, E., Vasile, I. and Sburlan, I.C. 2022. Experimental Study Regarding Long Range LiDAR Capabilities in Sensing Safety Distance for Vehicle Application. Sensors 22(15): 5731.
Roriz, R., Cabral, J. and Gomes, T. 2022. Automotive LiDAR Technology: A Survey. IEEE Transactions on Intelligent Transportation System 23(7): 6282-6297.
Transport Statistics Group, Planning Division, Department of Land Transport. 2022. Report on transportation statistics for 5 years. Other analytical statistics reports. Available Source: https://www.nso.go.th/nsoweb/nso/survey_detail/sK, July 31, 2023. (in Thai)
Tsai, P.S., Wu, T.F., Chen, J.Y. and Teng, P.T. 2023. Micro-Stepping Motor for Instrument Panel Using PWM Drive Method. Processes 11(12): 329.
Wang, Z., Zhou, X., Yang, C., Chen, Z. and Wu, X. 2017. An Experimental Study on Hysteresis Characteristics of a Pneumatic Braking System for a Multi-Axle Heavy Vehicle in Emergency Braking Situations. Sciences 7(8): 799.
Vaibhav, R., Amutha Prabha, N., Indragandhi, V., Bharathidasan, M., Vasantharaj, S. and Sam, A.J. 2022. Autonomous Braking System Using Linear Actuator. Journal of Sensors 2022(1): 7707600.
Vasile, I., Tudor, E., Sburlan, I.C., Gheti, M.A. and Popa, G. 2021. Experimental Validation of LiDAR Sensors Used in Vehicular Applications by Using a Mobile Platform for Distance and Speed Measurements. Sensors 21(23): 8147.
Wu, J., He, H.Z.R., Chen, P. and Chen, H. 2020. A Mechatronic Brake Booster for Electric Vehicles: Design, Control and Experiment. IEEE Transactions on Vehicular Technology 69(7): 7040-7053.
Yeong, D.J., Velasco-Hernandez, G., Barry, J. and Walsh, J. 2021. Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review. Sensor 21(6): 2140.
