
The Design and Development of GPS Navigation for Rice Direct Seeding Machine
Article Sidebar
Main Article Content
Abstract
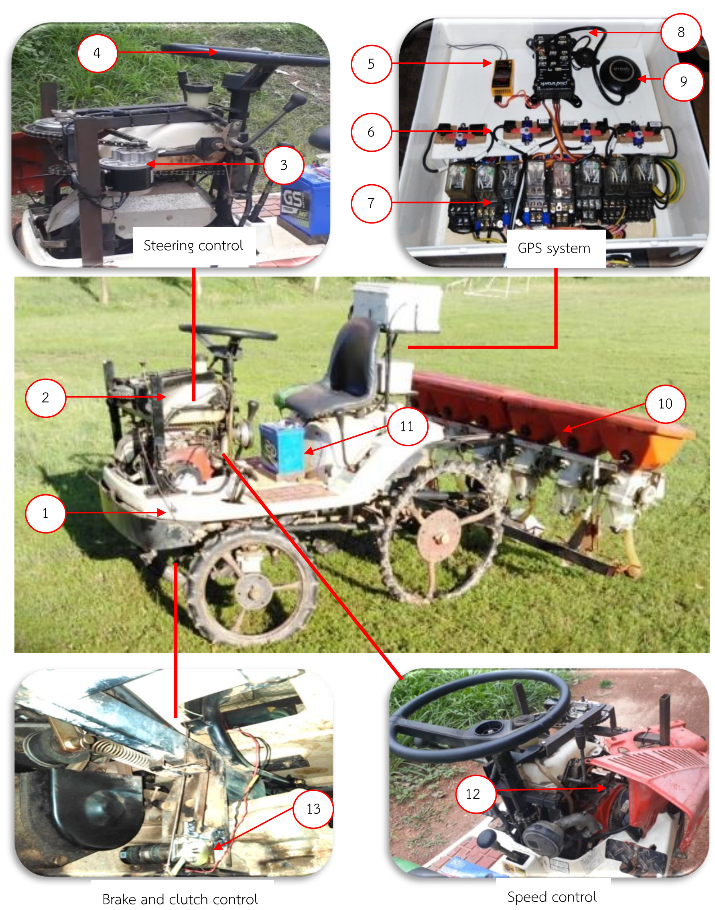
This article presents testing of the movement control of an automatic rice planter equipped with a GPS control system through the Mission Planner program. The installation of a steering control system for the machine involves receiving signals from the Pixhawk board with the GPS module. To obtain the position and determine the direction for the system to process and control the motor, ensure the dropper’s steering wheel remains on the specified path. The operation test accuracy is set to 0.2, 0.3 and 0.4 m·s-1 and 2 types of error distances are tested. This includes checking the starting-final stopping distance at 400 m and the straight-line error at 100 m, with data collected every 10 m. The test results showed that a speed of 0.2 m·s-1 results in the least stopping distance and straight-line error. Since the vehicle’s movement is repetitive, it will keep the vehicle in the specified line as best as possible. Result from different P Control adjustments.
Article Details

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Articles in this journal are copyrighted by the x may be read and used for academic purposes, such as teaching, research, or citation, with proper credit given to the author and the journal.use or modification of the articles is prohibited without permission.
statements expressed in the articles are solely the opinions of the authors.
authors are fully responsible for the content and accuracy of their articles.
other reuse or republication requires permission from the journal."
References
กรมการข้าวกระทรวงเกษตรและสหกรณ์. 2566. องค์ความรู้เรื่องพันธุ์ข้าว. แหล่งข้อมูล http://www.brrd.in.th/rkb/. เข้าถึงเมื่อ 2 มีนาคม 2566.
เกรียงไกร แซมสีม่วง มนูศักดิ์ จานทอง กระวี ตรีอานรรค วิชชาอุปภัย. 2560. การพัฒนารถแทรกเตอร์อัตโนมัติไร้คนขับนำทางด้วยระบบ GPS สำหรับเกษตรกรรมสมัยใหม่.วารสารสมาคมวิศวกรรมเกษตรแห่งประเทศไทย 23(1), 39-54.
ธีรวัฒน์ เจเถื่อน ฉัตริน เรืองจอหอ มงคล คธาพันธ์ กมลชนน วงศ์สถาน พยุงศักดิ์ จุลยุเสน. การพัฒนาระบบควบคุมการบังคับเลี้ยวสำหรับรถแทรกเตอร์อัตโนมัติ. วารสารวิศวกรรมฟาร์มและเทคโนโลยีการควบคุมอัตโนมัติ 5(1), 1-11.
มงคล เอกปัญญาพงศ์. 2557. หุ่นยนต์หยอดข้าวอัจฉริยะ. แหล่งข้อมูล http://www.it24hrs.com/2013/dropping-machine-for-thaifarmer/. เข้าถึงเมื่อ 20 สิงหาคม 2565.
อามิณฑ์ หล้าวงศ์ ศุภกิจ เศิกศิริ. 2563. การศึกษาการหาค่าที่เหมาะสมจากแบบจำลองพีไอดีโดยใช้วิธีพื้นผิวตอบสนอง. วารสารวิทยาศาสตร์และเทคโนโลยี มหาวิทยาลัยราชภัฏอุดรธานี 8(2), 105-117.
Ang, K.H., Chong, G., Yun Li., 2005. PID control system analysis, design, and technology".IEEE Transactions on Control Systems Technology 13 (4), 559–576.
Odolinski, R., Teunissen, P.J.G., 2017. Low-cost, high-precision, single-frequency GPS–BDS RTK positioning. GPS Solut 21, 1315–1330.
Valentea, D.S.M., Mominb, A., Griftb, T., Hansenb, A., 2020. Accuracy and precision evaluation of two low-cost RTK global navigation satellite systems. Computers and Electronics in Agriculture 168, 105142.
