
การออกแบบและสร้างหุ่นยนต์ขับเคลื่อนสำหรับการฉีดพ่นความแม่นยำสูง
Article Sidebar
Main Article Content
บทคัดย่อ
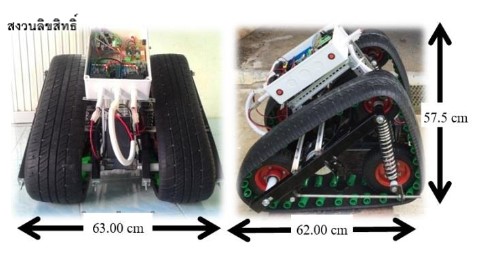
งานวิจัยนี้มุ่งเน้นพัฒนาหุ่นยนต์การเกษตรสำหรับการฉีดพ่นความแม่นยำสูง ตัวหุ่นยนต์ถูกออกแบบให้สามารถเข้าทำงานในพื้นที่จำกัดที่เครื่องจักรขนาดใหญ่เข้าไม่ถึง โดยหุ่นยนต์มีความยาว 62 cm กว้าง 63 cm และสูง 57.5 cm ระบบขับเคลื่อนประกอบด้วยล้อสายพานยาง 2 เส้นส่งกำลังจากมอเตอร์กระแสตรง 250 W ไปยังล้อสายพานแต่ละข้าง ควบคุมการทำงานด้วยไมโครคอนโทรลเลอร์ โดยสื่อสารผ่านโมดูลไร้สายคลื่นความถี่ 2.4 GHz ควบคุมโดยผู้ใช้ผ่านแผงบังคับ หุ่นยนต์ทำความเร็วสูงสุดได้1.32 m/s บนพื้นลาดยาง แรงฉุดลากสูงสุดทดสอบบนถนนลาดยางได้ 392.4 N ในส่วนระบบฉีดพ่นได้ออกแบบกลไกทำงานเป็นเซอร์โวมอเตอร์หมุนหัวฉีดสำหรับการปรับอัตราการไหลและมุมฉีดพ่น ควบคุมการทำงานผ่านไมโครคอนโทรลเลอร์ จากการทดสอบพบว่า ความสัมพันธ์ระหว่างอัตราการไหลกับ servo pulse width เป็นไปตามสมการโพลีโนเมียล ในขณะที่มุมการพ่นของหัวฉีดสัมพันธ์กับ servo pulse width เป็นไปตามสมการเลขชี้กำลัง อย่างไรก็ตาม จำนวนหัวฉีดและลำดับการเปิด-ปิดหัวฉีดมีอิทธิพลต่ออัตราการไหลและมุมฉีดพ่น ดังนั้นงานวิจัยในอนาคตจะต้องศึกษาเพื่อหาสมการที่สามารถปรับแก้ชดเชยปัจจัยดังกล่าว เพื่อทำให้อัตราการไหลและมุมฉีดพ่นมีความแม่นยำมากยิ่งขึ้น
Article Details
สมาคมวิศวกรรมเกษตรแห่งประเทศไทย
Thai Socities of Agricultural Engineering
เอกสารอ้างอิง
Greenpeace Thailand. 2016. Pesticides and health effects as awareness increased. Available at: https://www.greenpeace.org/thailand/publication/2920/pesticide-health/. Accessed on 10 November 2019.
พงษ์ศิริ เตี๋ยมนา อธิมาตร ติระนาถวิทยากุล ภูชิต สุเสวนานนท์ ปัญณะภาคย์ ธงวาส และเพิ่มทรัพย์ สุขแสงจันทร์ 2561 หุ่นยนต์ต้นแบบเพื่อเกษตรกรรมความแม่นยำสูง สืบค้นจากhttp://admission.eng.ku.ac.th/highlights/kuagrobot เมื่อ 11 ธันวาคม 2561
ภูริพันธุ์ สุวรรณฤกษ์ 2523 การออกแบบและสร้างหุ่นยนต์ภาคสนามโดยใช้กลไก Rocker-bogie วิทยานิพนธ์วิศวกรรมศาสตรมหาบัณฑิต ภาควิชาวิศวกรรมเครื่องกล จุฬาลงกรณ์มหาวิทยาลัย
Aishwarya, B.V., Archana, G., Umayal, C. 2015. Agriculture robotic vehicle based pesticide sprayer with efficiency optimization. Proceeding of 2015 IEEE Technological Innovation in ICT for Agriculture and Rural Development (TIAR), 59-65. July 2015, Chennai, India.
Fernando, A.A.C., Ricardo, C. 2013. Agricultural Robotics, Unmanned Robotic Service Units in Agricultural Tasks. lEEE Industrial Electronics Magazine, 48-58.
Innok Robotics. 2019. Spraying Robot. Available at: https://www.innok-robotics.de/en/products/heros/ applications/spraying-robot. Accessed on 10 November 2019.
Slaughter, D.C., Giles, D.K., Downey, D. 2008. Autonomous Robotic Weed Control Systems: A Review. Computer and Electronics in Agriculture 61(1), 63-78.
Summer, P.E. 2012. Sprayer Nozzle Selection. University of Georgia, Bulletin 1158.
