
การออกแบบและพัฒนาระบบนำทางด้วย GPS สำหรับเครื่องหยอดข้าว
Article Sidebar
Main Article Content
บทคัดย่อ
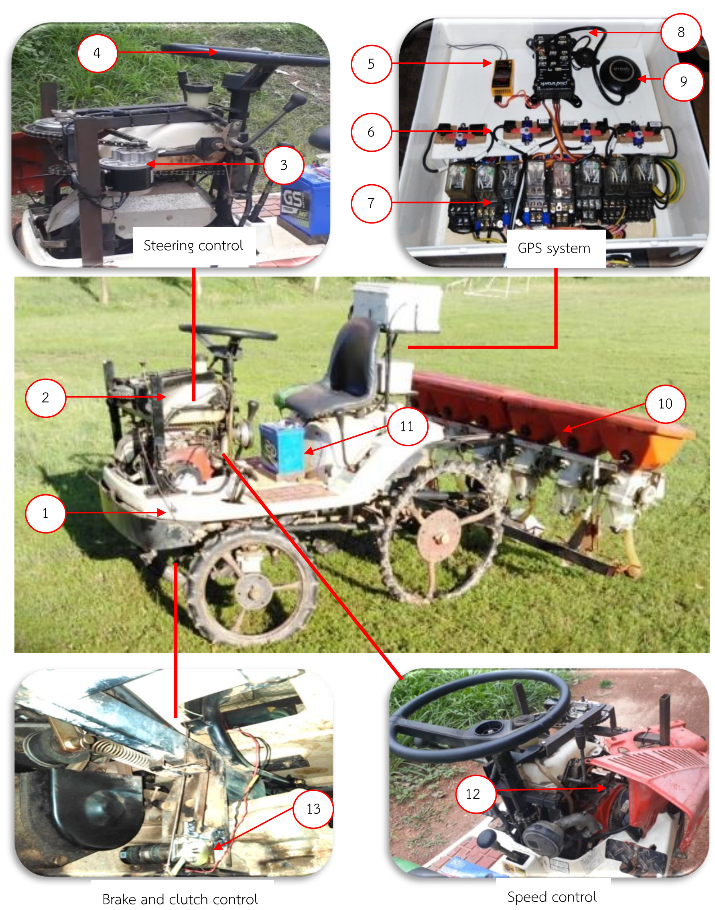
บทความวิจัยนี้เสนอการทดสอบการควบคุมการเคลื่อนที่ของเครื่องหยอดข้าวแบบอัตโนมัติที่ติดตั้งระบบการควบคุมด้วย GPS ผ่านโปรแกรม Mission Planner โดยติดตั้งระบบควบคุมการเลี้ยวของเครื่อง ด้วยการรับสัญญาณจากบอร์ด pixheak ร่วมกับ GPS module เพื่อรับพิกัดและตรวจสอบทิศทางให้ระบบประมวลผลและสั่งงานไปยังมอเตอร์ที่ควบคุมการหมุนของพวงมาลัยของเครื่องหยอดให้อยู่ในเส้นทางที่กำหนด การทดสอบการทำงานจะความแม่นยำจะกำหนดความเร็วในการเคลื่อนที่ไว้ที่ 0.2 0.3 และ 0.4 m·s-1 และทดสอบระยะความผิดพลาด 2 รูปแบบ ได้แก่ การตรวจสอบระยะหยุดรถจากเริ่มต้น-สุดท้ายที่ระยะ 400 m และความผิดพลาดในแนวเส้นตรงในระยะ 100 m โดยจะเก็บข้อมูลทุกๆ 10 m ผลจากการทดสอบพบว่าการใช้ความเร็วเท่ากับ 0.2 m·s-1 จะส่งผลทำให้ระยะหยุดและมีค่าผิดพลาดแนวเส้นตรงน้อยสุด เนื่องจากการเคลื่อนที่ของตัวรถเป็นไปอย่างซ้าๆ จะส่งผลทำให้ให้ตัวรถอยู่ในแนวเส้นที่กำหนดได้ดีมากสุด ผลเนื่องจากการปรับค่า P Control ที่ต่างกัน
Article Details

อนุญาตภายใต้เงื่อนไข Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
สมาคมวิศวกรรมเกษตรแห่งประเทศไทย
Thai Socities of Agricultural Engineering
เอกสารอ้างอิง
กรมการข้าวกระทรวงเกษตรและสหกรณ์. 2566. องค์ความรู้เรื่องพันธุ์ข้าว. แหล่งข้อมูล http://www.brrd.in.th/rkb/. เข้าถึงเมื่อ 2 มีนาคม 2566.
เกรียงไกร แซมสีม่วง มนูศักดิ์ จานทอง กระวี ตรีอานรรค วิชชาอุปภัย. 2560. การพัฒนารถแทรกเตอร์อัตโนมัติไร้คนขับนำทางด้วยระบบ GPS สำหรับเกษตรกรรมสมัยใหม่.วารสารสมาคมวิศวกรรมเกษตรแห่งประเทศไทย 23(1), 39-54.
ธีรวัฒน์ เจเถื่อน ฉัตริน เรืองจอหอ มงคล คธาพันธ์ กมลชนน วงศ์สถาน พยุงศักดิ์ จุลยุเสน. การพัฒนาระบบควบคุมการบังคับเลี้ยวสำหรับรถแทรกเตอร์อัตโนมัติ. วารสารวิศวกรรมฟาร์มและเทคโนโลยีการควบคุมอัตโนมัติ 5(1), 1-11.
มงคล เอกปัญญาพงศ์. 2557. หุ่นยนต์หยอดข้าวอัจฉริยะ. แหล่งข้อมูล http://www.it24hrs.com/2013/dropping-machine-for-thaifarmer/. เข้าถึงเมื่อ 20 สิงหาคม 2565.
อามิณฑ์ หล้าวงศ์ ศุภกิจ เศิกศิริ. 2563. การศึกษาการหาค่าที่เหมาะสมจากแบบจำลองพีไอดีโดยใช้วิธีพื้นผิวตอบสนอง. วารสารวิทยาศาสตร์และเทคโนโลยี มหาวิทยาลัยราชภัฏอุดรธานี 8(2), 105-117.
Ang, K.H., Chong, G., Yun Li., 2005. PID control system analysis, design, and technology".IEEE Transactions on Control Systems Technology 13 (4), 559–576.
Odolinski, R., Teunissen, P.J.G., 2017. Low-cost, high-precision, single-frequency GPS–BDS RTK positioning. GPS Solut 21, 1315–1330.
Valentea, D.S.M., Mominb, A., Griftb, T., Hansenb, A., 2020. Accuracy and precision evaluation of two low-cost RTK global navigation satellite systems. Computers and Electronics in Agriculture 168, 105142.
