
การพัฒนาระบบนำทางที่ทนทานและการกู้คืนเส้นทางอัตโนมัติสำหรับหุ่นยนต์ทางการเกษตรด้วยการผสานระบบ GNSS และ LiDAR: การศึกษาผ่านแบบจำลองสถานการณ์
Article Sidebar
Main Article Content
บทคัดย่อ
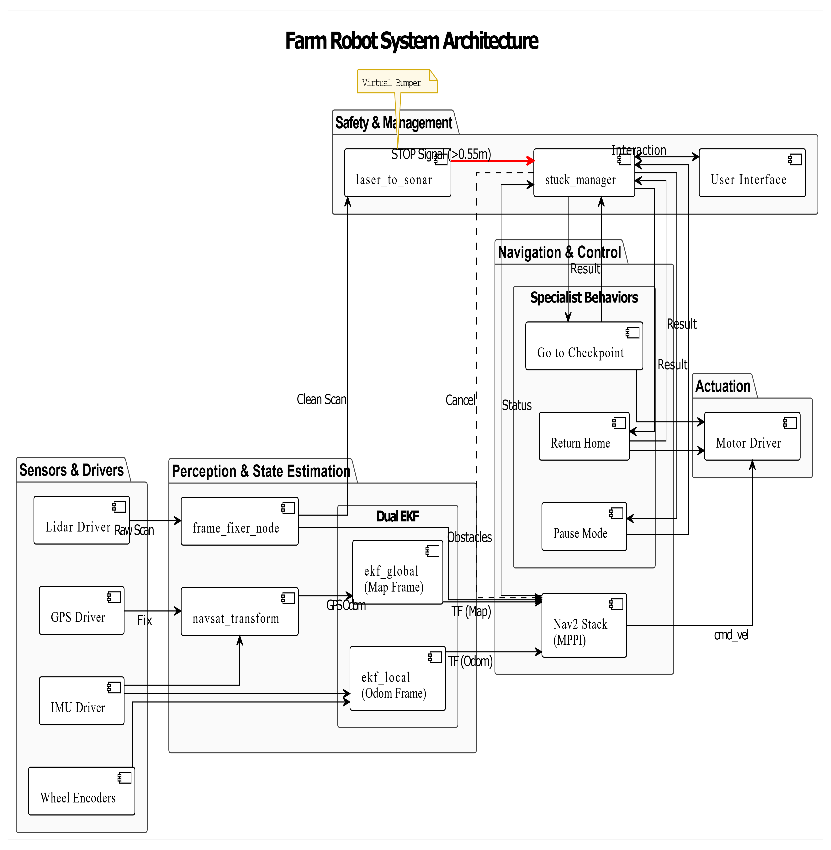
งานวิจัยนี้นำเสนอการพัฒนาระบบนำทางที่มีความทนทาน (Robust Navigation System) สำหรับหุ่นยนต์ทางการเกษตรที่ปฏิบัติงานในสภาพแวดล้อมแบบไร้โครงสร้าง โดยบูรณาการการระบุตำแหน่งด้วยระบบดาวเทียมนำทาง (GNSS) เข้ากับการหลบหลีกสิ่งกีดขวางท้องถิ่นผ่านแผนที่แสดงค่าน้ำหนักสิ่งกีดขวางแบบพลวัต (Dynamic Local Costmap) ที่ประมวลผลจากข้อมูลLiDAR พร้อมทั้งพัฒนา "ตัวจัดการสภาวะชะงักงัน" (Stagnation Manager) บนพื้นฐานของเครื่องจักรสถานะจำกัด (Finite State Machine: FSM) เพื่อเฝ้าระวังสภาวะทางจลนศาสตร์เทียบกับคำสั่งควบคุมและสั่งการพฤติกรรมการกู้คืน (Recovery Behaviors) อัตโนมัติเมื่อหุ่นยนต์เกิดการหยุดนิ่ง ระบบดังกล่าวได้รับการทดสอบในสภาพแวดล้อมจำลองด้วยโปรแกรม Gazebo บนระบบปฏิบัติการ ROS 2 Jazzy ซึ่งสร้างขึ้นโดยอ้างอิงโครงสร้างพื้นที่จากข้อมูลภาพถ่ายทางอากาศของแปลงเกษตรจริง ผลการศึกษาแสดงให้เห็นว่าระบบสามารถตรวจจับและแก้ไขสภาวะติดขัดได้ด้วยตนเอง ซึ่งช่วยยกระดับความเชื่อถือได้ในการปฏิบัติงานและลดภาระการเฝ้าระวังของผู้ใช้งานได้อย่างมีนัยสำคัญ
Article Details

อนุญาตภายใต้เงื่อนไข Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
สมาคมวิศวกรรมเกษตรแห่งประเทศไทย
Thai Socities of Agricultural Engineering
เอกสารอ้างอิง
ประดิษฐ์ หมู่เมืองสอง, สุชญาน หรรษสุข. 2550. การวิเคราะห์การสั่นสะเทือน. กรุงเทพมหานคร: ซีเอ็ดยูเคชั่น.
สยาม ตุ้มแสงทอง. 2546. การปรับปรุงเครื่องคัดขนาดผลมังคุดแบบจานหมุน. วิทยานิพนธ์วิศวกรรมศาสตร์มหาบัณฑิต. กรุงเทพมหานคร: บัณฑิตวิทยาลัย, มหาวิทยาลัยเกษตรศาสตร์.
Bechar and Vigneault 2016 Bechar, A., & Vigneault, C. (2016). Agricultural robots for field operations: Concepts and components. Biosystems Engineering, 149, 94–111. (เปเปอร์นี้คือตัวแม่บทเรื่องสภาพแวดล้อมไร้โครงสร้าง)
Duckett et al. 2018 Duckett, T., Pearson, S., Blackmore, S., & Grieve, B. (2018). Agricultural Robotics: The Future of Robotic Agriculture. UK-RAS Network White Papers. (เปเปอร์นี้ยืนยันเรื่องหุ่นยนต์ช่วยลดภาระและเพิ่มประสิทธิภาพ)
Office of Agricultural Economics 2023 Office of Agricultural Economics. (2023). Agricultural Statistics of Thailand 2022. Ministry of Agriculture and Cooperatives. (ข้อมูลสถิติยืนยันความสำคัญของเกษตรไทย)
Poapongsakorn and Pantakua 2017 Poapongsakorn, N., & Pantakua, P. (2017). Agriculture 4.0: Obstacles and how to break through. Thailand Development Research Institute (TDRI). (งานวิจัย TDRI เรื่องปัญหาแรงงานและต้นทุน)
Bengochea-Guevara, J.M., Conesa-Muñoz, J., Andújar, D., Ribeiro, A. 2016. Merge Fuzzy Visual Servoing and GPS-Based Planning to Obtain a Proper Navigation Behavior for a Small Crop-Inspection Robot. Sensors 16(2), 276.
Cui, L., Le, F., Xue, X., Sun, T., Jiao, Y. 2024. Design and Experiment of an Agricultural Field Management Robot and Its Navigation Control System. Agronomy 14(4), 654.
Fehér, Á., Domina, Á., Bárdos, Á., Aradi, S., Bécsi, T. 2025. Path planning via reinforcement learning with closed-loop motion control and field tests. Engineering Applications of Artificial Intelligence 142, 109870.
Guo, J., Wang, S., Mao, Y., Wang, G., Wu, G., Wu, Y., Liu, Z. 2024. Supervised learning study on ground classification and state recognition of agricultural robots based on multi-source vibration data fusion. Computers and Electronics in Agriculture 219, 108791.
Höffmann, M., Patel, S., Büskens, C. 2023. Optimal Coverage Path Planning for Agricultural Vehicles with Curvature Constraints. Agriculture 13(11), 2112.
Liu, J., He, L.P., Li, Z., Shi, W. 2020. Energy Efficient Path Planning for Indoor Wheeled Mobile Robots. In: Proceedings of the 2020 Global Reliability and Prognostics and Health Management (PHM-Shanghai), 1–6. Shanghai, China. 13-16 October 2020.
Postmes, J., Sirmacek, B. 2021. A System for Efficient Path Planning and Target Assignment for Robotic Swarms in Agriculture. In: Proceedings of the 11th International Conference on the Internet of Things (IoT '21), 121–128. Enschede, Netherlands. 8-12 November 2021.
Sadhin, A.H., Hashim, S.Z.M., Samma, H., Khamis, N. 2023. YOLO: A Competitive Analysis of Modern Object Detection Algorithms for Road Defects Detection Using Drone Images. Baghdad Science Journal. https://dx.doi.org/10.21123/bsj.2023.9027.
Vahdanjoo, M., Gislum, R., Sørensen, C.A.G. 2023. Operational, Economic, and Environmental Assessment of an Agricultural Robot in Seeding and Weeding Operations. AgriEngineering 5(1), 299–324.
Yin, X., Dong, W., Wang, X., Yu, Y., Yao, D. 2024. Route planning of mobile robot based on improved RRT star and TEB algorithm. Scientific Reports 14, 4513.
Yu, X., Fan, Z., Wan, H., He, Y., Du, J., Li, N., Yuan, Z., Xiao, G. 2019. Positioning, Navigation, and Book Accessing/Returning in an Autonomous Library Robot using Integrated Binocular Vision and QR Code Identification Systems. Sensors 19(4).
Zhou, X., Yan, J., Yan, M., Mao, K., Yang, R., Liu, W. 2023. Path Planning of Rail-Mounted Logistics Robots Based on the Improved Dijkstra Algorithm. Applied Sciences 13(17), 9955.
Zou, T., Angeles, J., Hassani, F. 2018. Dynamic modeling and trajectory tracking control of unmanned tracked vehicles. Robotics and Autonomous Systems 110, 102–111.
Hiremath et al. 2014 Hiremath, S. A., van der Heijden, G. W., van Evert, F. K., Stein, A., & ter Braak, C. J. (2014). Laser range finder models for autonomous navigation of a robot in a maize field. Computers and Electronics in Agriculture, 100, 41-50.
Lu et al. 2014 Lu, D. V., Hershberger, D., & Smart, W. D. (2014). Layered Costmaps for Context-Sensitive Navigation. In 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 709-715.
Macenski, S., Martín, F., White, R., & Clavero, J. G. (2020). The Marathon 2: A Navigation System. In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2718-2725.
Williams, G., Wagener, N., Goldfain, B., Drews, P., Rehg, J. M., & Theodorou, E. A. (2017). Information theoretic MPC for model-based reinforcement learning. In 2017 IEEE International Conference on Robotics and Automation (ICRA), 1714-1721.
Mousazadeh 2013 Mousazadeh, H. (2013). A technical review on navigation systems of agricultural robots. Journal of Agricultural Engineering and Technology, 1(4), 1-22.
Arkin, R. C. (1998). Behavior-Based Robotics. MIT Press.
