
Design and Construction of Driving Robot for High Precision Spraying
Article Sidebar
Main Article Content
Abstract
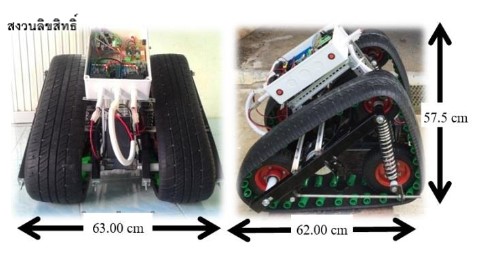
This research was focused on the development of farming robot for high precision spraying. The robot was designed to work in confined spaces where large machines are inaccessible. Its dimension measured 62 cm long, 63 cm wide and 57.5 cm high. The driving system consisted of two rubber tracks driven by 250W DC motor on each ones. A microcontroller was applied to control the robot by recieving the command via 2.4GHz wireless module that was sent from the wireless control panel. The results of the experiment shown the robot can run at a maximum speed of 1.32 m/s on asphalt road with maximum traction force tested on the asphalt road being 392.4 N. Regarding spraying system, servo motors were used to turn the nozzle heads for adjusting the flow rate and spraying angle as controlled via a microcontroller. Test results showed that relationship between the flow rate and servo pulse width was explained by a polynomial equation. The spraying angle was related to the servo pulse width by an exponential equation. However, the number of the nozzles and operational sequence had effects on the flow rate and the spraying angle. Therefore future research was needed to investigate and obtain equations which could compensate such effects so as to make high precision for the flow rate and the spraying angle.
Article Details
use or modification of the articles is prohibited without permission.
statements expressed in the articles are solely the opinions of the authors.
authors are fully responsible for the content and accuracy of their articles.
other reuse or republication requires permission from the journal."
References
Greenpeace Thailand. 2016. Pesticides and health effects as awareness increased. Available at: https://www.greenpeace.org/thailand/publication/2920/pesticide-health/. Accessed on 10 November 2019.
พงษ์ศิริ เตี๋ยมนา อธิมาตร ติระนาถวิทยากุล ภูชิต สุเสวนานนท์ ปัญณะภาคย์ ธงวาส และเพิ่มทรัพย์ สุขแสงจันทร์ 2561 หุ่นยนต์ต้นแบบเพื่อเกษตรกรรมความแม่นยำสูง สืบค้นจากhttp://admission.eng.ku.ac.th/highlights/kuagrobot เมื่อ 11 ธันวาคม 2561
ภูริพันธุ์ สุวรรณฤกษ์ 2523 การออกแบบและสร้างหุ่นยนต์ภาคสนามโดยใช้กลไก Rocker-bogie วิทยานิพนธ์วิศวกรรมศาสตรมหาบัณฑิต ภาควิชาวิศวกรรมเครื่องกล จุฬาลงกรณ์มหาวิทยาลัย
Aishwarya, B.V., Archana, G., Umayal, C. 2015. Agriculture robotic vehicle based pesticide sprayer with efficiency optimization. Proceeding of 2015 IEEE Technological Innovation in ICT for Agriculture and Rural Development (TIAR), 59-65. July 2015, Chennai, India.
Fernando, A.A.C., Ricardo, C. 2013. Agricultural Robotics, Unmanned Robotic Service Units in Agricultural Tasks. lEEE Industrial Electronics Magazine, 48-58.
Innok Robotics. 2019. Spraying Robot. Available at: https://www.innok-robotics.de/en/products/heros/ applications/spraying-robot. Accessed on 10 November 2019.
Slaughter, D.C., Giles, D.K., Downey, D. 2008. Autonomous Robotic Weed Control Systems: A Review. Computer and Electronics in Agriculture 61(1), 63-78.
Summer, P.E. 2012. Sprayer Nozzle Selection. University of Georgia, Bulletin 1158.
